Generalized Planning for the Abstraction and Reasoning Corpus
Abstract
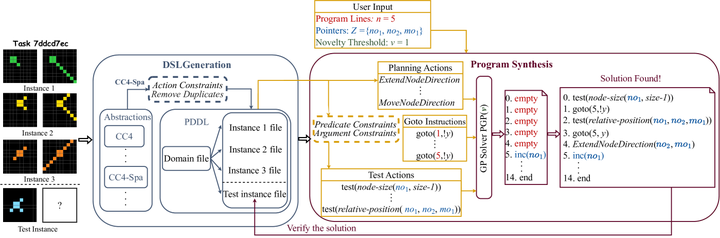
The Abstraction and Reasoning Corpus (ARC) is a general artificial intelligence benchmark that poses difficulties for pure machine learning methods due to its requirement for fluid intelligence with a focus on reasoning and abstraction. In this work, we introduce an ARC solver, Generalized Planning for Abstract Reasoning (GPAR). It casts an ARC problem as a generalized planning (GP) problem, where a solution is formalized as a planning program with pointers. We express each ARC problem using the standard Planning Domain Definition Language (PDDL) coupled with external functions representing object-centric abstractions. We show how to scale up GP solvers via domain knowledge specific to ARC in the form of restrictions over the actions model, predicates, arguments and valid structure of planning programs. Our experiments demonstrate that GPAR outperforms the state-of-the-art solvers on the object-centric tasks of the ARC, showing the effectiveness of GP and the expressiveness of PDDL to model ARC problems. The challenges provided by the ARC benchmark motivate research to advance existing GP solvers and understand new relations with other planning computational models.